
執筆者プロフィール

システムコンサルティング事業本部
宮本 一輝:
インフラエンジニア、AIエンジニアを経て、2021年よりモビリティ業界に対してモビリティデータの分析やマルチメディアのログを活用したデータ分析立案などのコンサルティング業務に従事
実用化が進む自動運転技術
野村総合研究所 システムコンサルティング事業本部の宮本です。
近年、自動運転技術は急速な発展を遂げており、世界各地で実用化されつつあります。アメリカではWaymoやGM
Cruise、中国ではBaiduやPony.aiといった企業が、自動運転レベル4のロボタクシーサービスを開始しています。日本でも福井県の永平寺町で自動運転レベル4の移動サービスが始まっており、この技術の実用化が着実に進んでいることがわかります。
しかしながら、現時点での自動運転技術はまだ人間の運転能力に及ばないのが実情です。自動運転サービスを広く普及させるためには、技術開発を継続していくことが不可欠です。
今回は、自動運転技術のキーテクノロジーの開発動向について、独自調査をもとにレポートします。
自動運転技術の要素技術
自動運転は、自動化の程度によってレベル1からレベル5までの5段階に分類されています。この分類は、技術の発展段階を明確に示すとともに、各レベルにおける人間とシステムの役割分担を定義しています。レベル1と2では運転の主体は依然として人ですが、レベル3以上では運転の主体はシステムに移行します。
- レベル1(運転支援):アクセル・ブレーキ操作またはハンドル操作のどちらかを部分的に自動化
- レベル2(部分的自動運転):アクセル・ブレーキ操作とハンドル操作の両方を部分的に自動化
- レベル3(条件付き自動運転):特定の走行環境条件を満たす限定された領域において、システムが全て運転。ただしシステムの作動が困難な場合は人が運転
- レベル4(限定条件下での完全自動運転):特定の走行環境条件を満たす限定された領域においてシステムが全て運転
- レベル5(条件のない完全自動運転):システムが全て運転
レベル3やレベル4の自動運転システムにおいて重要な概念が「運行設計領域(ODD:Operational Design Domain)」です。ODDは、自動運転システムが安全に運行できる特定の走行環境や運用方法の条件を定義しています。具体的には、高速道路や専用レーンの有無などの道路条件や、天候や夜間制限などの環境条件がODDとなります。
各種公開情報をもとに、自動運転レベル4で重要となる技術要素を4分類、8技術に独自設定しました。
- 4分類:
-
- 検知技術:IoTセンサー
- 認識技術:センサーフュージョンアルゴリズム、コンピュータビジョン
- 予測・判断技術:AIアルゴリズムとそれを実装するチップ、ディープラーニング、畳み込みニューラルネットワーク
- 位置・走路決定技術:SLAM(Simultaneous Localization and Mapping)、計画生成技術
なお、SLAMは位置特定と地図生成を同時に行う技術であり、計画形成技術は周辺環境の認識や自車位置から経路計画を生成し動作を生成する技術のことです。
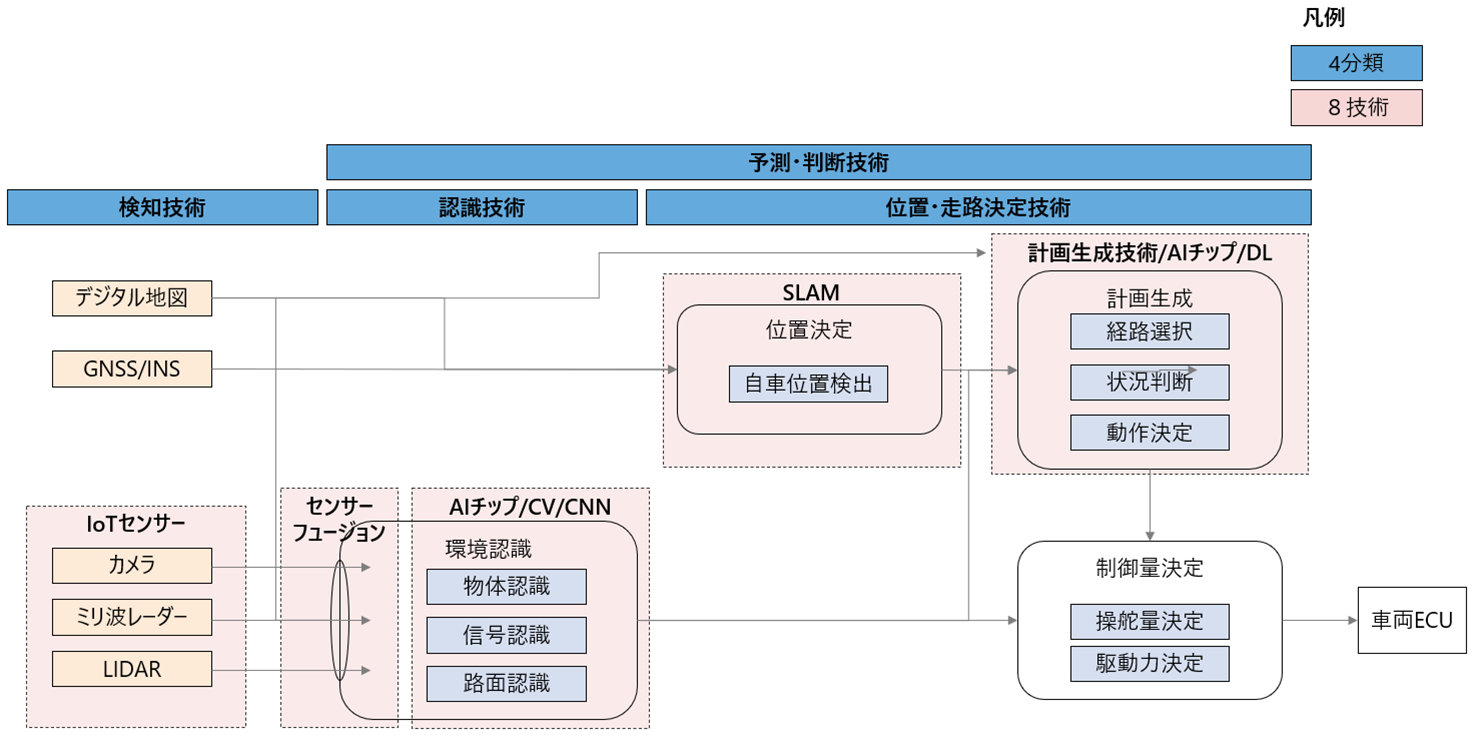
図1:自動運転技術の構成例
- 8技術:
-
- IoTセンサー:カメラやミリ波レーダー、LiDARなどのセンサーで自動運転車両周辺の環境を監視する技術。自動運転システムの制御に利用されます。
- センサーフュージョンアルゴリズム:複数のセンサー情報を統合して包括的な情報を得る技術。複数の情報により自動運転車両の環境認識能力を向上させます。
- コンピュータビジョン(CV):画像や動画からその内容や特徴を理解する技術。自動運転車両周辺の物体認識や標識の認識などに利用されます。
- AIアルゴリズムとそれを実装するチップ(AIチップ):AIでの画像認識や予測処理などのアルゴリズムの演算処理を高速化するための半導体チップ。自動運転車両では車両で高速演算処理ができるチップにより画像処理などが行われます。
- ディープラーニング(DL):多層のニューラルネットワーク。自動運転車両では他車両の軌道予測や交通状況の予測に用いられます。
- 畳み込みニューラルネットワーク(CNN):画像認識やパターン認識に使用されるディープラーニングの一種。自動運転車両では物体認識や標識の認識に用いられます。
- SLAM:自動運転車両の位置を把握し、自車周辺環境の地図化を行います。
- 計画生成技術:自動運転車両の走行経路の作成を行います。
自動運転技術の開発動向
自動運転レベル4の開発動向を把握するため、上記の4分類、8技術に関連する特許出願状況を調査しました。
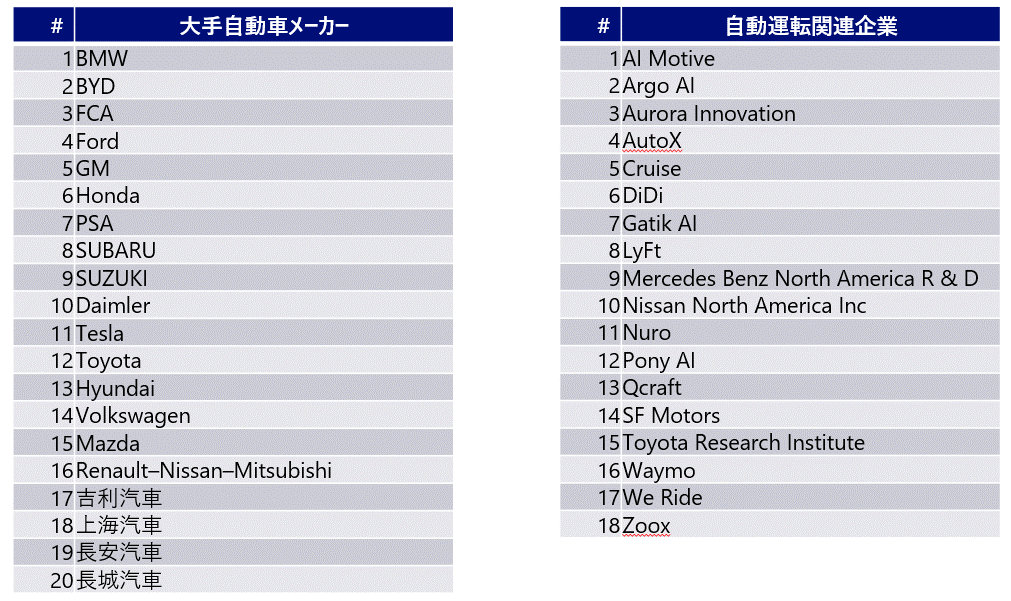
調査対象は、世界の自動車販売台数上位20社の大手自動車メーカーと、カリフォルニア州における自動運転走行距離上位18社の自動運転関連企業としました。特許の出願地域はアメリカ、欧州、中国とし、期間は2018年から2022年までを対象としました。
表1:調査対象企業
①自動運転レベル4で重要となる技術の特許出願数では、大手自動車メーカーが優勢
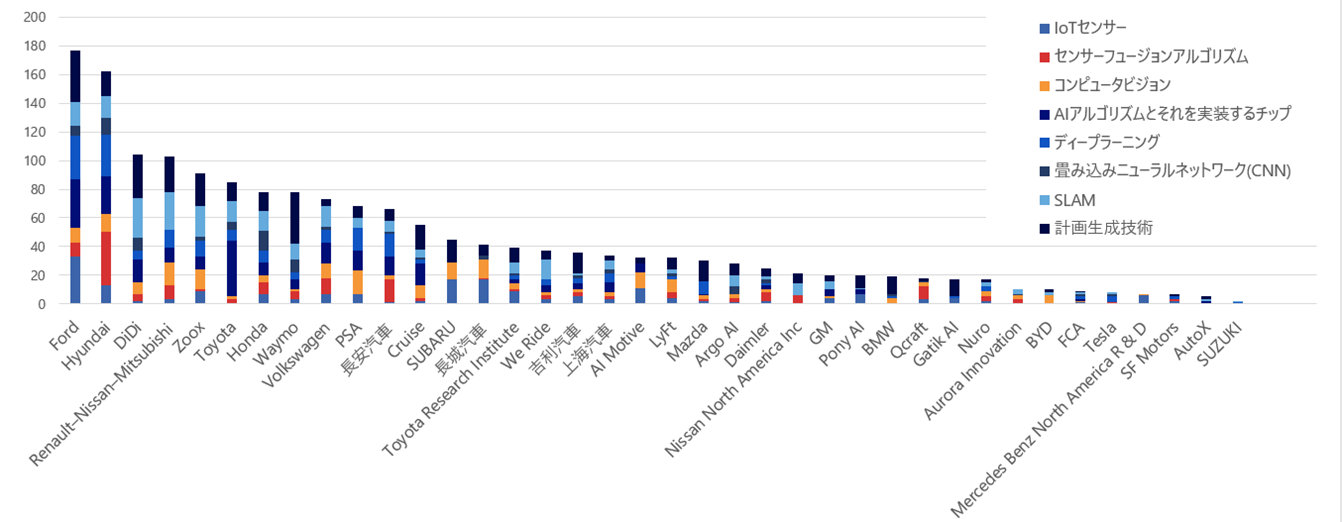
図2:自動運転レベル4における重要技術の企業別出願特許数ランキング
8技術合計の特許出願数では、FordやHyundaiなどの大手自動車メーカーが上位を占めています。例えば、Fordはかつて自動運転開発パートナーとしてArgo AIと提携していました。Argo
AIの解散後は、その元社員を雇用してLatitude AIを立ち上げ、自動運転開発を継続しています。
Hyundaiは、自動車部品大手Aptivとの合弁会社であるMotionalと共同で自動運転技術を開発しており、ロボタクシーIONIQ 5を開発中です。
一方で、DiDiやZoox、Waymoといった新興の自動運転関連企業も特許出願ランキングで上位に位置しており、自動運転技術の開発競争が激化していることが見て取れます。
②技術別の特許出願数では、6技術で大手自動車メーカーが優勢
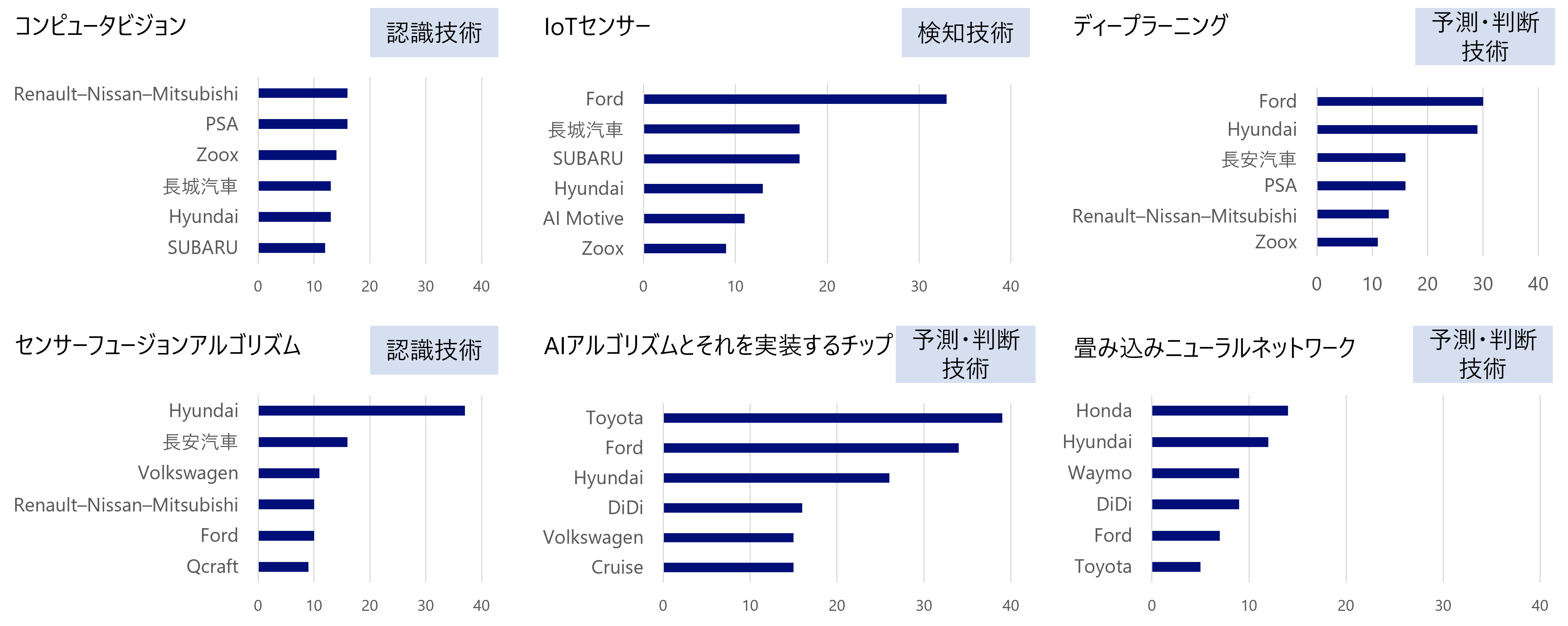
図3:技術別出願特許数ランキング(1)
8技術のうち6技術については、大手自動車メーカーが特許出願数で先行している結果となりました。技術ごとに上位企業が異なっており、各企業の強みとする領域や重点を置く領域がわかります。
③計画生成技術とSLAMの2技術では新興の自動運転関連企業が先行
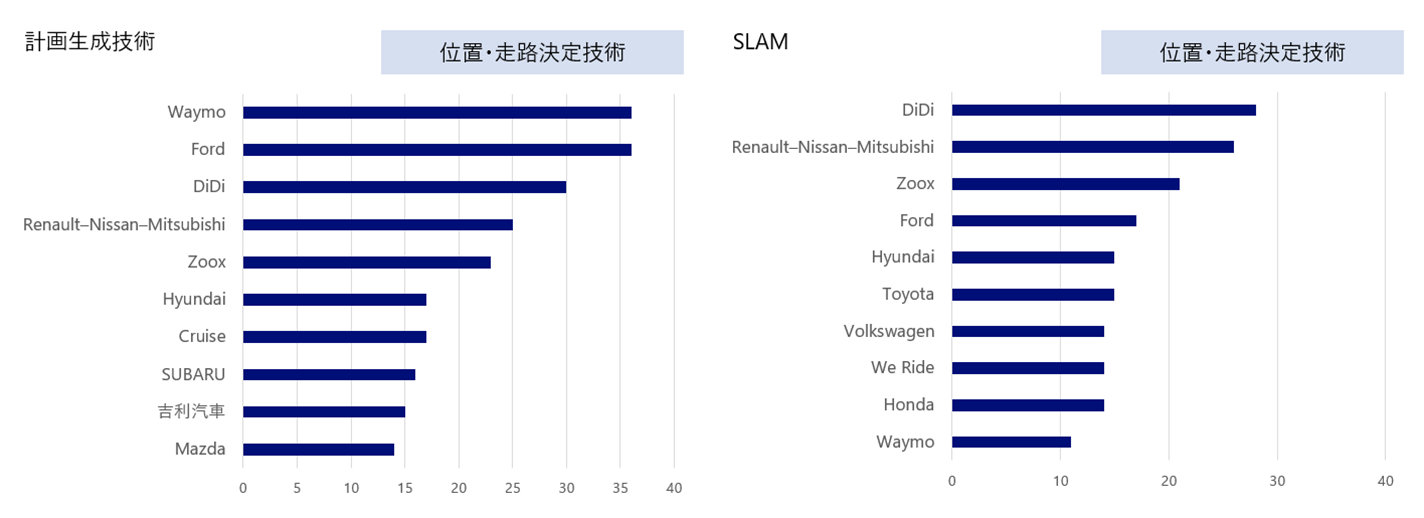
図4:技術別出願特許数ランキング(2)
計画生成技術ではWaymo 、SLAMではDiDiといったように、新興の自動運転関連企業がトップを占めています。これらの技術は実際の路上での走行データや道路状況を加味した実験を進めることが技術開発に有効であると考えられます。そのため、ロボタクシー事業で先行する新興の自動運転関連企業は、豊富な走行データや路上実験を武器に技術開発を進めていると推測できます。
自動運転技術の課題(限界)
自動運転技術の背景にある課題について、自動運転からの離脱理由をもとに分析しました。自動運転からの離脱とは、監視員やテストドライバーが危険だと判断して自動運転機能をオフにする事象を指します。カリフォルニア州では自動運転が認可されており、実証実験が盛んに行われていますが、自動運転の事故や自動運転からの離脱について、カリフォルニア州車両管理局(DMV)へのレポートの提出が義務付けられており、一般公開されています。
課題分析では、2022年にDMVに届けられた離脱理由をもとに、自動運転メーカー23社の計8216件の離脱理由を40種の原因カテゴリに分類して集計し、分析しました。原因カテゴリには、例えば物体認識の不備や他車両の接近、信号の誤認識といったものが含まれています。
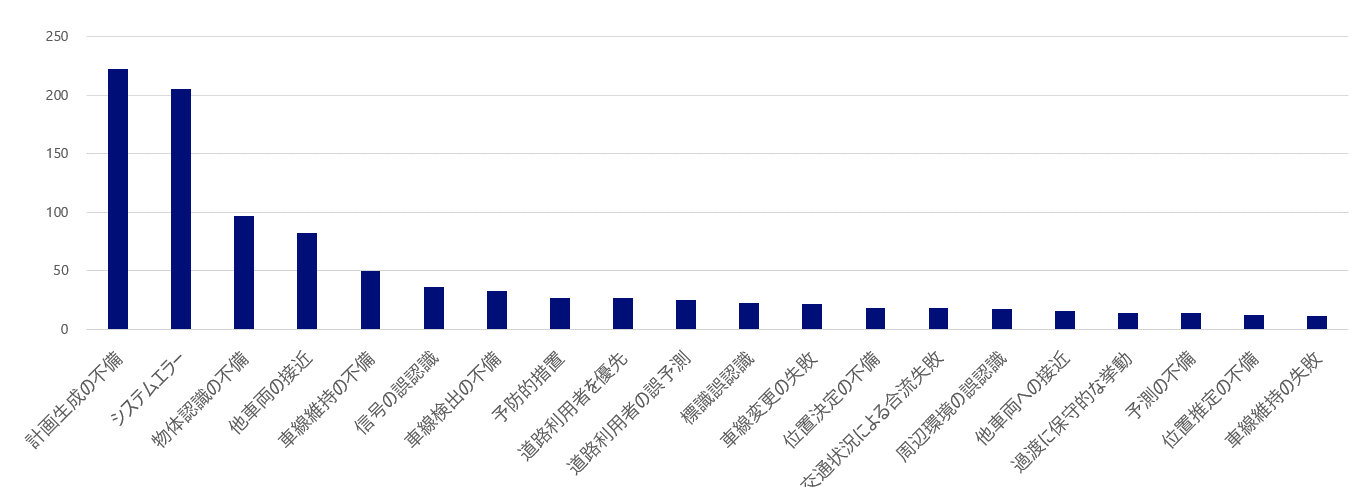
図5:自動運転からの離脱原因TOP20(縦軸数値は参考値)
自動運転からの離脱原因のトップは「計画生成の不備」でした。この結果から、計画生成技術は自動運転技術の発展に重要であり、その精度を高めていく必要があると考えられます。計画生成は、物体認識や自己位置推定の情報をインプットとして行われるため、計画生成の不備の要因には物体認識の能力不足も含まれる可能性もあります。つまり、計画生成の不備は他の技術の集合体要素として位置付けることができます。
また、離脱原因の第2位となった「システムエラー」については、ハードウェア障害やソフトウェアのバグなどが該当します。実証実験時のレポートが多く報告されていたことが原因として考えられます。
計画生成の不備の理由には以下のようなものがあります。
- 右折時の他車の陰に隠れるなど横方向の視界が不明瞭であったため右折に失敗
- 後方から来た車両が自車に向かって猛スピードで接近してきたため走行を停止
- 走行車線へ他車両が割り込んできたため走行を停止
- 車両の妨害により車線変更に失敗
計画生成の不備理由の約3割は、他車両要因のものや視界が不明瞭な事象といった人間のドライバーでも対処が困難な状況に関連しています。これらの課題を解決するには、他車両の急な動きを素早く検知したり、死角など視界が遮られた場所の情報を取得したりする必要があります。しかし、これらの情報を車両単体で取得することは困難です。したがって、車両が車両外の情報源と連携できれば、これらの課題を解決できる可能性があります。
車両と車両外の情報連携で鍵となる技術
車両と車両外との情報連携を行う技術としてV2X(Vehicle to X)があり、自動運転技術発展のカギになると考えられます。
V2Xはその接続先によって4種類に分類されています。
- V2I(路車間):道路など路側インフラのセンサーと車が通信し、安全性を向上させます。路側インフラとしては信号や交差点の制御システム、道路標識などがあります。
- V2V(車車間):車同士が通信。車同士の衝突事故の予防や渋滞の軽減、交差点での死角情報の連携などを実現します。
- V2P(車歩行者間):車と歩行者が通信します。車周辺の歩行者の位置や動きを把握し、歩行者に対して警告を行います。
- V2N(車ネットワーク間):車と通信ネットワークとの通信です。車が交通情報や緊急車両、道路状況などのデータを取得し、最適な経路選択や安全な運転を実現します。また遠隔監視への適用も想定しています。
計画生成の不備の4つの理由に対しては、V2Xにより以下のように解決できると考えられます。
- V2IやV2V、V2Pにより右折時に他車の陰の情報を連携することで、飛び出してくる車を事前に警告
- V2Vにより接近する車の情報を連携することで、予防的に走行車線を変更
- 自車センサー情報に加え、V2VやV2Nにより他車両の情報を取得し、走行経路を決定
- V2Iにより車線変更の全体統制を実施
日本政府は、V2X技術の適用に向けた取り組みを積極的に進めています。
戦略的イノベーション創造プログラム(SIP)では、協調型自動運転のユースケースが整理されており、車両単体の情報だけでは対処できない状況などを含む25のケースを整理しています。例えば、交差点にて黄色表示中に、直進すべきか停止すべきかの判断に迷うジレンマゾーンに対して、V2Iにより信号サイクル情報を路側インフラから交差点進入車両に提供し、車両の減速や停止の支援を行うことができます。
国土交通省自動車局の「令和4年度地域公共交通確保維持改善事業費補助金」では、全国28か所で商用バスでの路車協調システムの実証実験が実施されています。
北海道上士幌町ではルート上の4箇所の信号機情報を車両に伝える「信号協調」と、柱に設置したセンサーが取得した人や車の情報を伝える「路車協調」が行われています。山梨県富士吉田市では「本線行合流支援」と「信号交差点の右折支援」の2つの実証実験が行われています。
しかし、V2X技術の普及には課題もあります。例えば、車両同士のネゴシエーションなどのV2V通信を行うユースケースでは、車両協調を行えるほどV2V対応車両が普及していないという問題があります。V2I/V2Nを用いた異常車両や逆走車の通知など、通常の道路状況では再現が難しいケースもあります。これらのユースケースに対しては、専用区域を設けるなどして、ユースケースが想定している状況を再現する必要があります。
V2Xの普及に向けては、インフラ整備に関するコストとマネタイズ、および安全性という2つの課題を解決する必要があります。これらの課題に取り組むことが、V2X技術の実用化と普及に向けた重要なステップとなり、自動運転技術の発展につながるでしょう。
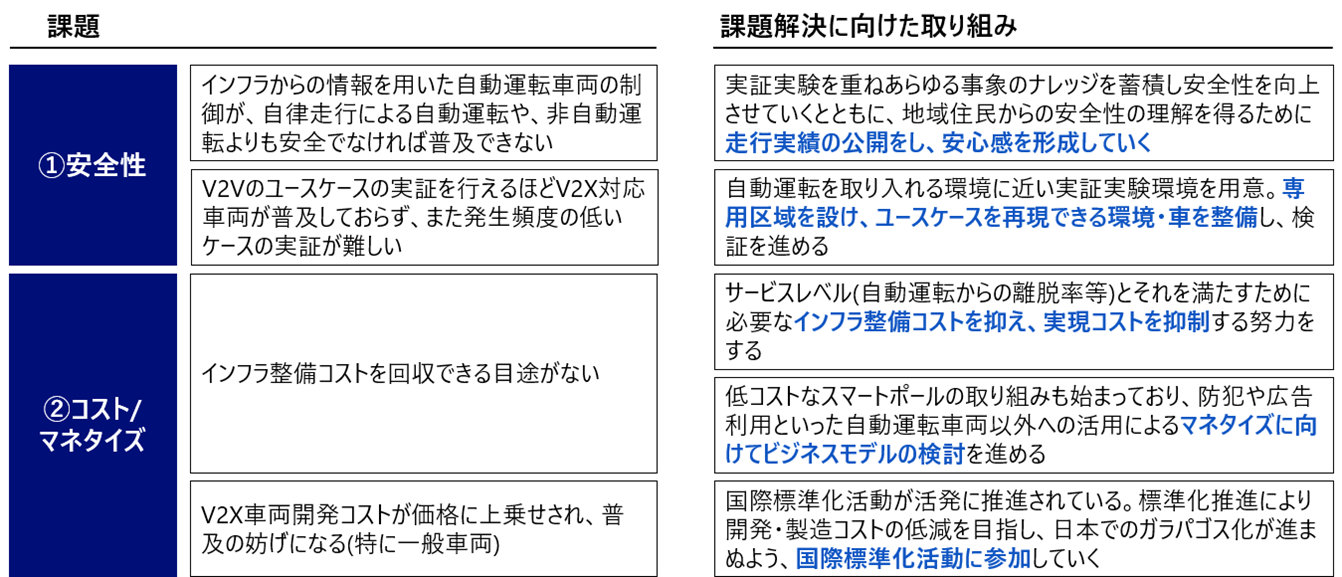
図6:課題と解決に向けた取り組み
このようにまだまだ課題が残っていますが、解決に向けて官民が協力して検証を進めていくことが必要であると考えます。
まとめ
今回は、自動運転技術の実用化状況と技術開発動向について解説しました。
自動運転技術をさらに進歩させ、機能性と安全性を向上させるためには、車両同士や車両と道路等の社会インフラ間の情報連携するV2Xが重要であることを述べました。
自動運転を社会に広く普及・定着させるためには、国家主導のもと官民が協力し、実証実験を積み重ね、課題を一つひとつ解決していくことが不可欠です。
プロフィール
-
宮本 一輝のポートレート 宮本 一輝
TMXコンサルティング部
2013年に通信キャリアに入社し、法人向けシステムの運用設計業務等に従事。その後、AI関連企業を経て2021年に野村総合研究所に入社。自動車業界に対するプロジェクトマネジメント支援やデータ分析支援、UX改善支援などのコンサルティング業務に従事している。
※組織名、職名は現在と異なる場合があります。